


Vidhi Lalchand
Postdoctoral Fellow, Broad and MIT
Vidhi Lalchand
Harvard Computer Science
03-04-2023
- Thomas Garrity
Gaussian processes as a "function" learning paradigm.
Regression with GPs: Both inputs \((X)\) and outputs \( (Y)\) are observed.
Latent Variable Modelling with GP: Only outputs \( (Y)\) are observed.
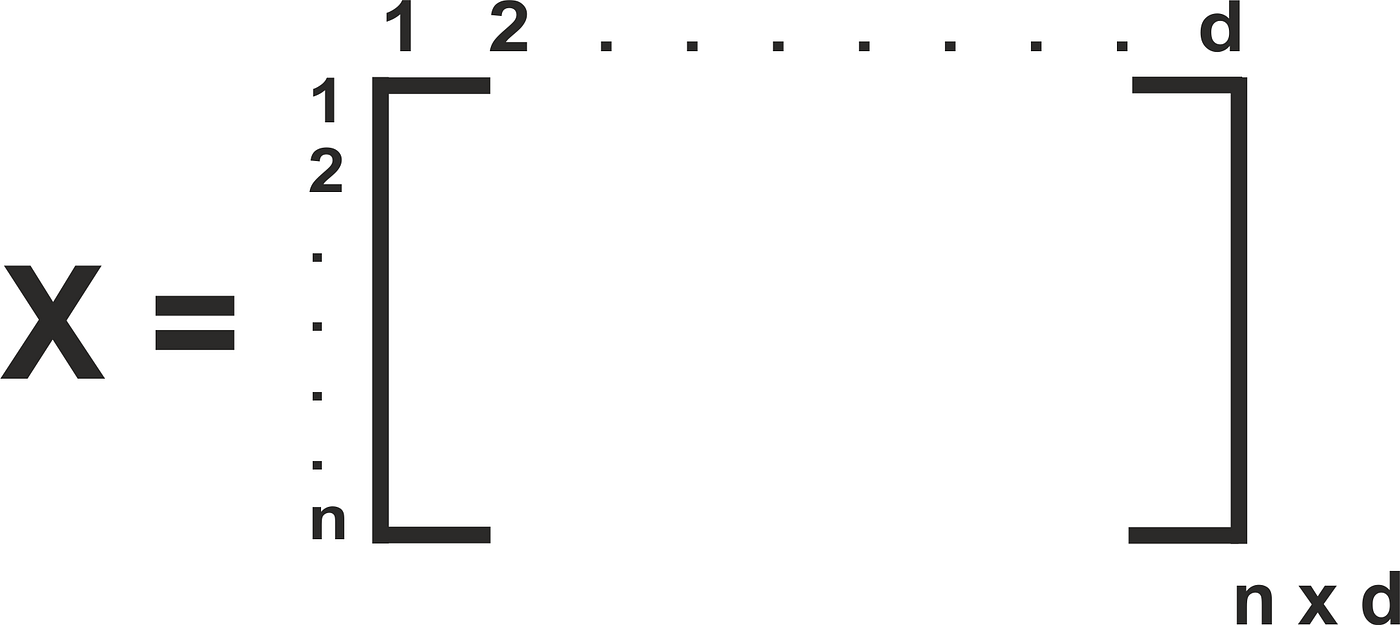
Without loss of generality, we are going to assume \( X \equiv \{\bm{x}_{n}\}_{n=1}^{N}, X \in \mathbb{R}^{N \times D}\) and \( Y \equiv \{\bm{y}_{n}\}_{n=1}^{N}, Y \in \mathbb{R}^{N \times 1}\)
Gaussian Processes
Gaussian processes are a powerful non-parametric paradigm for performing state-of-the-art regression.
We need to understand the notion of distribution over functions.
What is a GP?
A sample from a \(k\)-dimensional Gaussian \( \mathbf{x} \sim \mathcal{N}(\mu, \Sigma) \) is a vector of size \(k\). $$ \mathbf{x} = [x_{1}, \ldots, x_{k}] $$
The mathematical crux of a GP is that \( [f(x_{1}), f(x_{2}), f(x_{3}),....., f(x_{n})]\) is just a N-dimensional multivariate Gaussian \( \mathcal{N}(\mu, K) \).
A GP is an infinite dimensional analogue of a Gaussian distribution \( \rightarrow \) a sample from it is a vector of infinite length?
But at any given point, we only need to represent our function \( f(x) \) at a finite index set \( \mathcal{X} = [x_{1},\ldots, x_{500}]\). So we are interested in our long function vector \( [f(x_{1}), f(x_{2}), f(x_{3}),....., f(x_{500})]\).
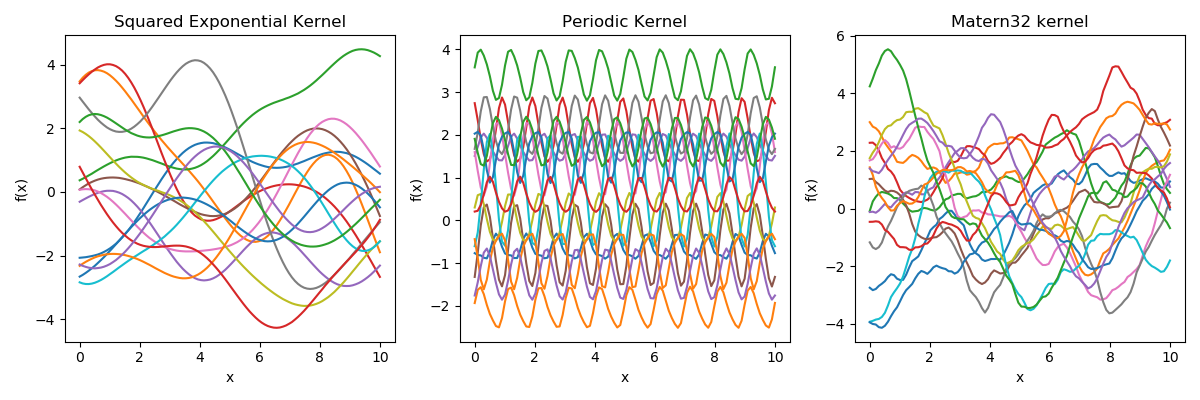
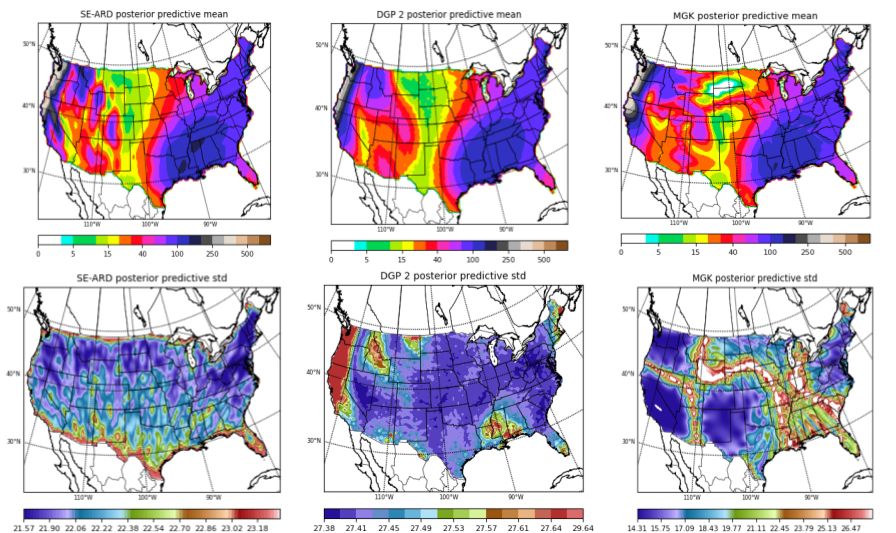
Function samples from a GP
The kernel function \( k(x,x')\) is the heart of a GP, it controls all of the inductive biases in our function space like shape, periodicity, smoothness.
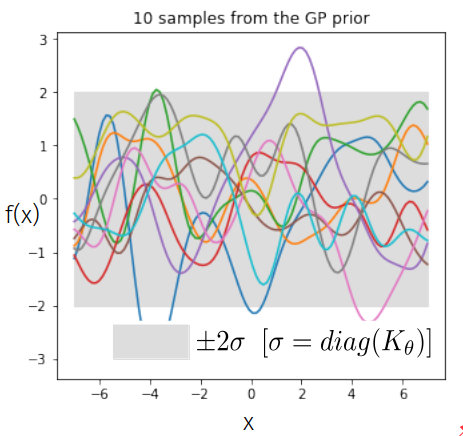
prior over functions \( \rightarrow \)
Sample draws from a zero mean GP prior under different kernel functions.
In reality, they are just draws from a multivariate Gaussian \( \mathcal{N}(0, K)\) where the covariance matrix has been evaluated by applying the kernel function to all pairs of data points.
Infinite dimensional prior:
\(f(x) \sim \mathcal{GP}(m(x), k_{\theta}(x,x^{\prime})) \)
\(f(X) \sim \mathcal{N}(m(X), K_{X})\)
For a finite set of points, \( X \):
\( k_{\theta}(x,x^{\prime})\) encodes the support and inductive biases in function space.
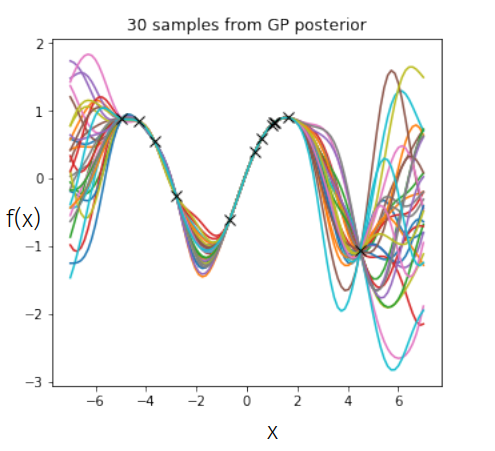
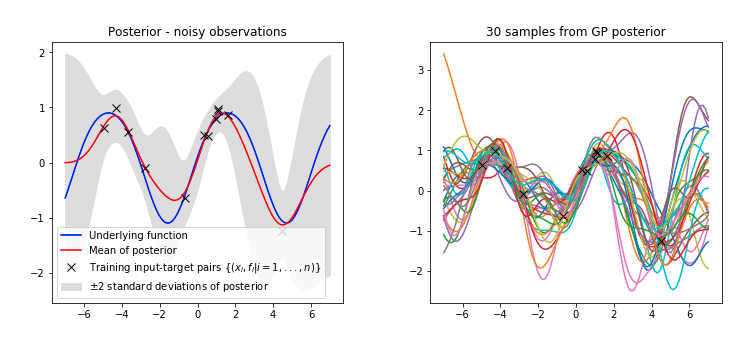
Gaussian Process Regression
How do we fit functions to noisy data with GPs?
1. Given some noisy data \( \bm{y} = \lbrace{y_{i}}\rbrace_{i=1}^{N} \) at \( X = \{ x_{i}\}_{i=1}^N\) input locations.
2. You believe your data comes from a function \( f\) corrupted by Gaussian noise.
$$ \bm{y} = f(X) + \epsilon, \hspace{10pt} \epsilon \sim \mathcal{N}(0, \sigma^{2})$$
Data Likelihood: \( \hspace{10pt} y|f \sim \mathcal{N}(f(x), \sigma^{2}) \)
Prior over functions: \( f|\theta \sim \mathcal{GP}(0, k_{\theta}) \)
(The choice of kernel function \( k_{\theta}\) controls how your functions space looks.)
.....but we still need to fit the kernel hyperparameters \( \theta\)
Learning Step:
Learning in Gaussian process models occurs through the maximisation of the marginal likelihood w.r.t the kernel hyperparameters.
Data likelihood
Prior
Denominator of Bayes Rule
Learning in a GP
Predictions in a GP
Joint
Conditional
Examples of GP Regression
Gaussian processes can also be used in contexts where the observations are a gigantic data matrix \( Y \equiv \{ y_{n}\}_{n=1}^{N}, y_{n} \in \mathbb{R}^{D}\). \(D\) can be pretty big \(\approx 1000s\).
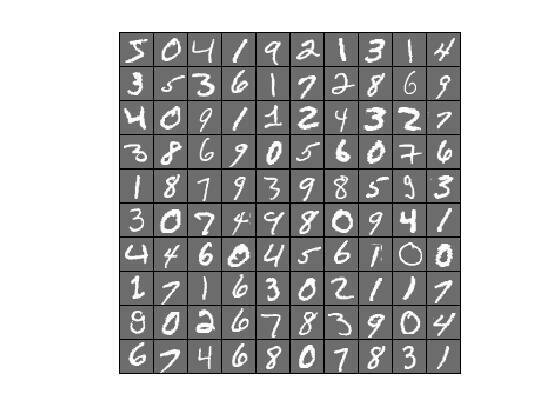
Imagine a stack of images, where each image has been flattened into a vector of pixels and stacked together rowise in a matrix.
28
28
n = number of images
d = 784
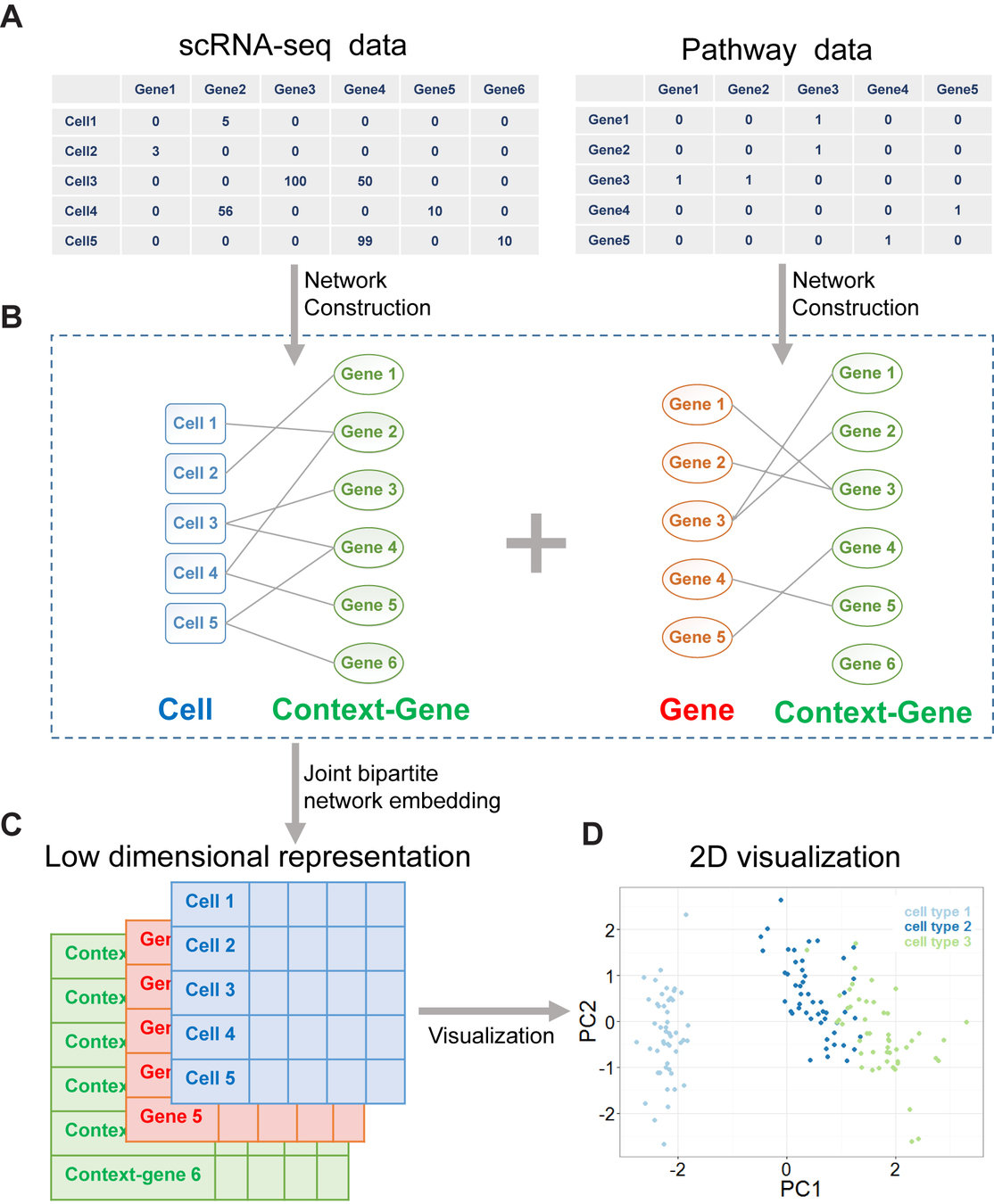
Given: High dimensional training data \( Y \equiv \{\bm{y}_{n}\}_{n=1}^{N}, Y \in \mathbb{R}^{N \times D}\)
Learn: Low dimensional latent space \( X \equiv \{\bm{x}_{n}\}_{n=1}^{N}, X \in \mathbb{R}^{N \times Q}\)
N x D
The Gaussian process bridge
2d latent space
High-dimensional data space
Schematic of a Gaussian process Latent Variable Model
. . .
. . .
. . .
N
D
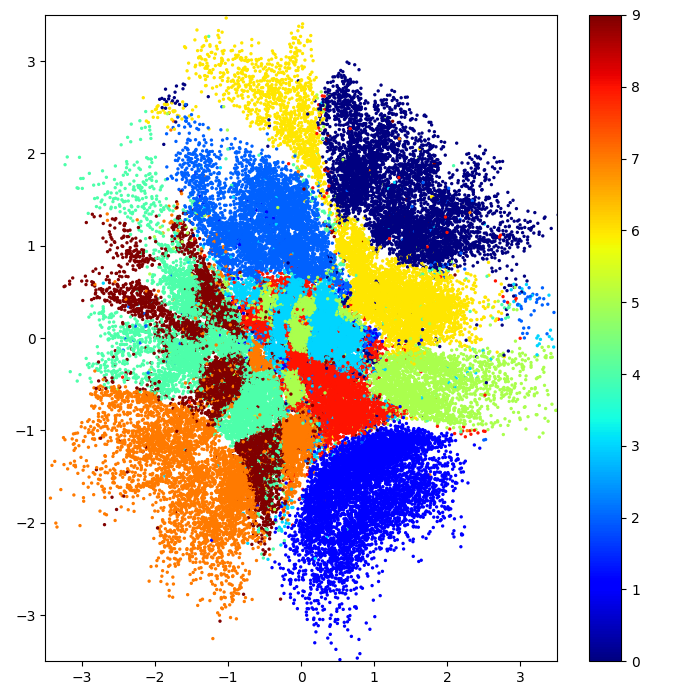
Structure / clustering in latent space can reveal insights into the high-dimensional data - for instance, which points are similar.
each cluster is a digit (coloured by labels)
\( Z \in \mathbb{R}^{N \times Q}\)
\( F \in \mathbb{R}^{N \times D}\)
\( Y \in \mathbb{R}^{N \times D} (= F + noise)\)
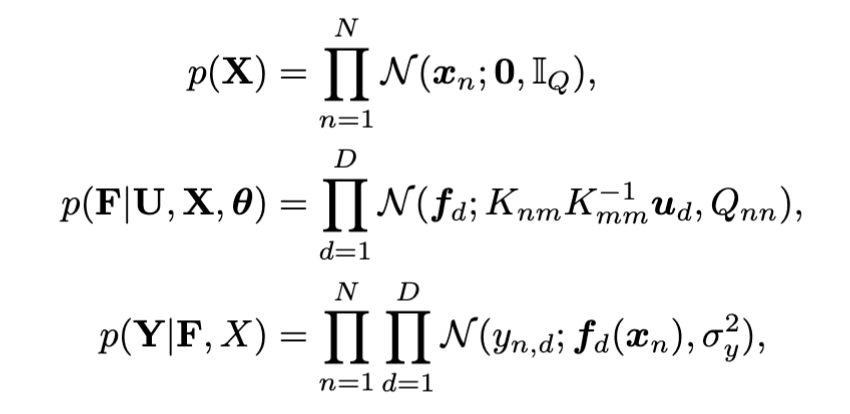
Mathematical set-up
Data Likelihood:
Prior structure:
The data are stacked row-wise but modelled column-wise, each column with a GP.
\(X\)
\(x_{n}\)
Mathematical set-up
The data are stacked row-wise but modelled column-wise, each column with a GP.
\(X\)
\(x_{n}\)
Optimisation objective:
Stochastic Variational Sparse GPs: Generative Model
where,
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
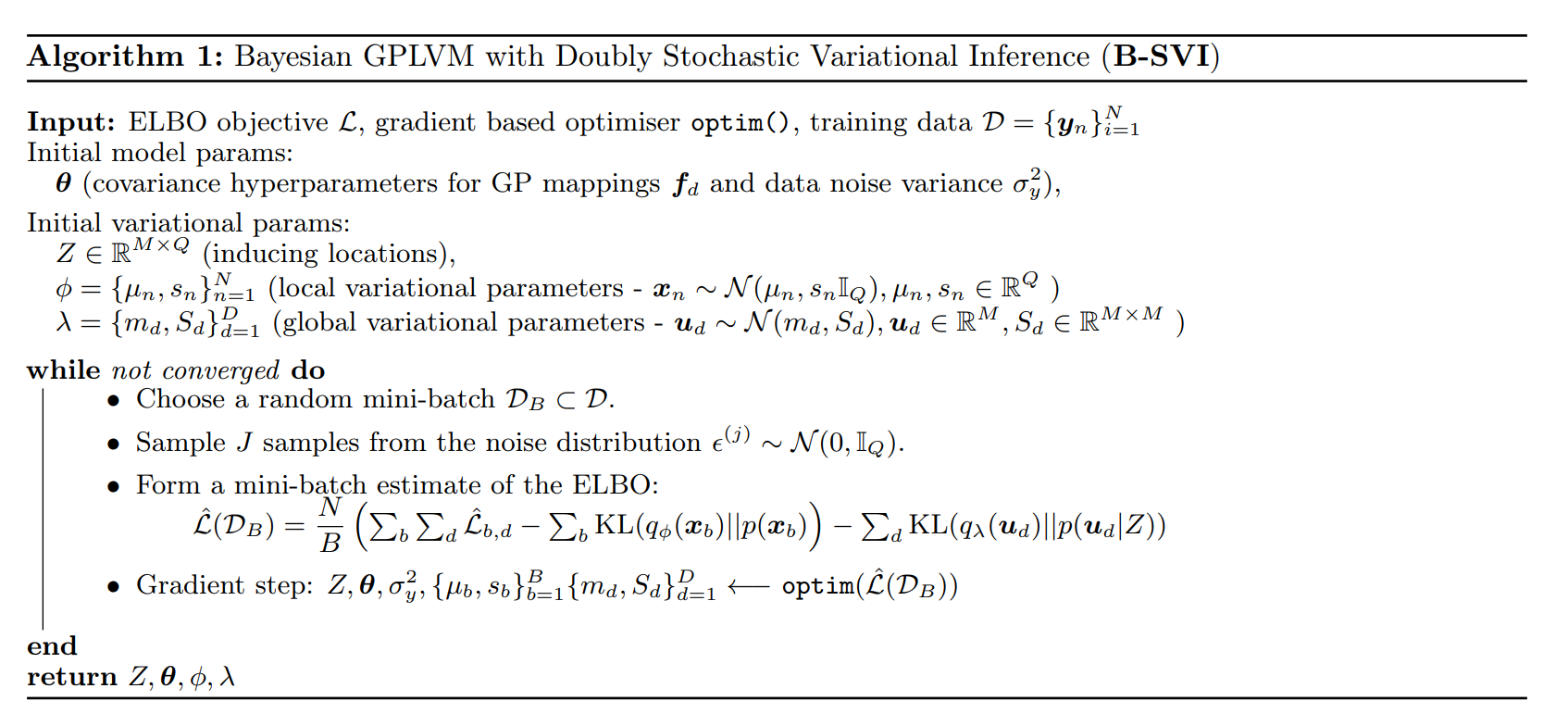
Stochastic variational inference for GP regression was introduced in Hensman et al (2013). In this work we use the SVI bound in the latent variable setting with unknown \(X\) and multi-output \(Y\).
GPLVM ELBO:
Non-Gaussian likelihoods Flexible variational families Amortised Inference Interdomain inducing variables Missing data problems
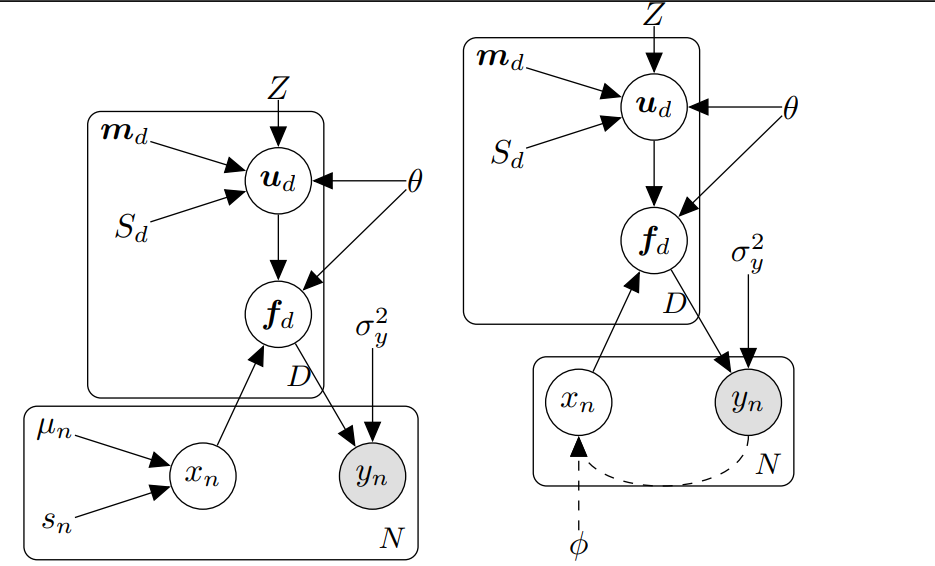
Stochastic Variational Bayesian GPLVM
GPR ELBO:
Stochastic Variational Bayesian GPLVM
Final factorised form:
Non-Gaussian likelihoods Flexible variational families Interdomain inducing variables Missing data problems
Point Inference \(\longrightarrow\) \( \bm{x}_{n} \) is a point estimate, no KL term
MAP Inference \(\longrightarrow\) Only prior term appears in ELBO \( p(\bm{x}_{n})\), \( \bm{x}_{n} \) is still a point estimate
Mean-field Variational \(\longrightarrow\) \( q(\bm{x}_{n})\) is a factorised Gaussian (factorising across \(d\)).
Amortised Inference \(\longrightarrow\) \( q(\bm{x}_{n})\) is potentially a Gaussian with a full covariance matrix (modelling correlations across dimensions)
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
Mean-field inference over latents
Amortised Inference over latents
Stochastic Variational Bayesian GPLVM
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
Stochastic Variational Bayesian GPLVM
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
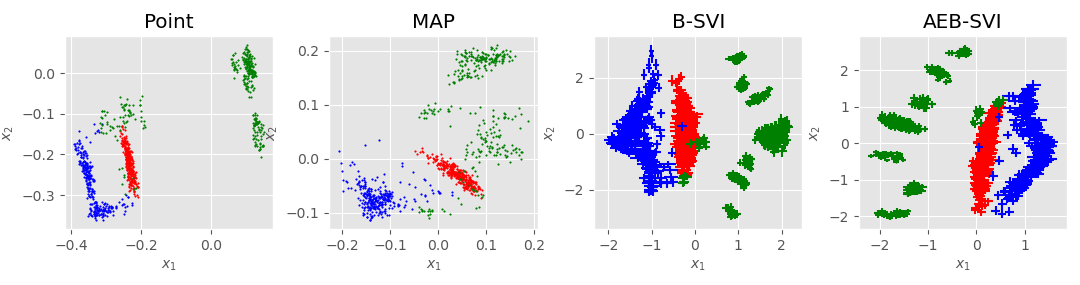
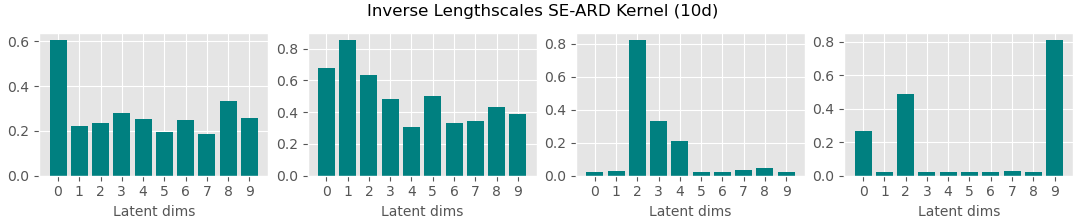
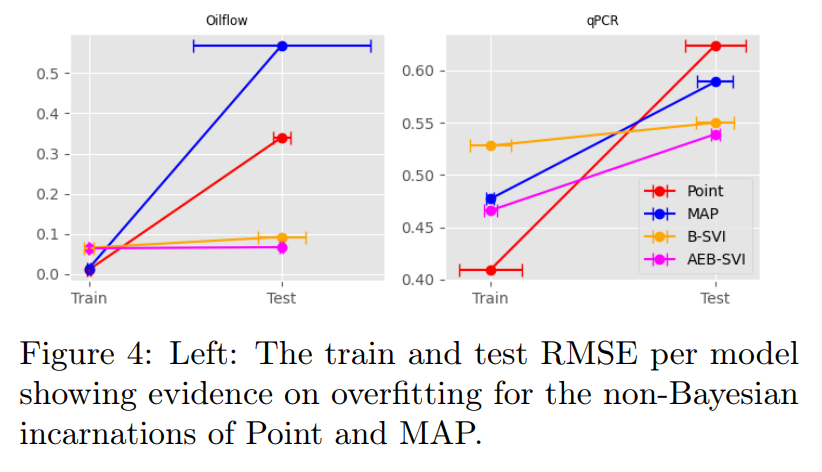
Oilflow (12d)
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
Oilflow (12d)
| Point | MAP | Bayesian-SVI | AEB-SVI | |
|---|---|---|---|---|
| RMSE | 0.341 (0.008) | 0.569 (0.092) | 0.0925 (0.025) | 0.067 (0.0016) |
| NLPD | 4.104 (3.223) | 8.16 (1.224) | -11.3105 (0.243) | -11.392 (0.147) |
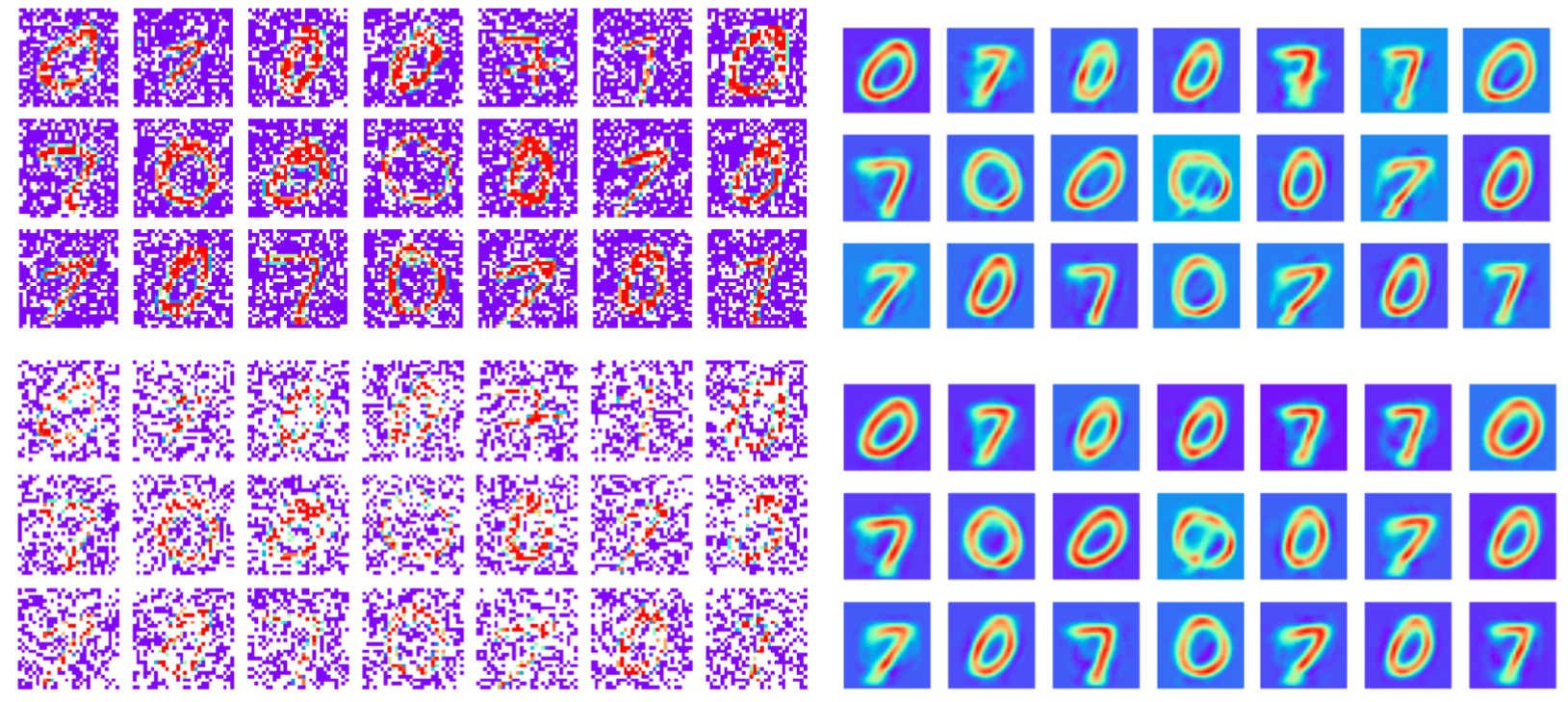
Robust to Missing Data: MNIST Reconstruction
30%
60%
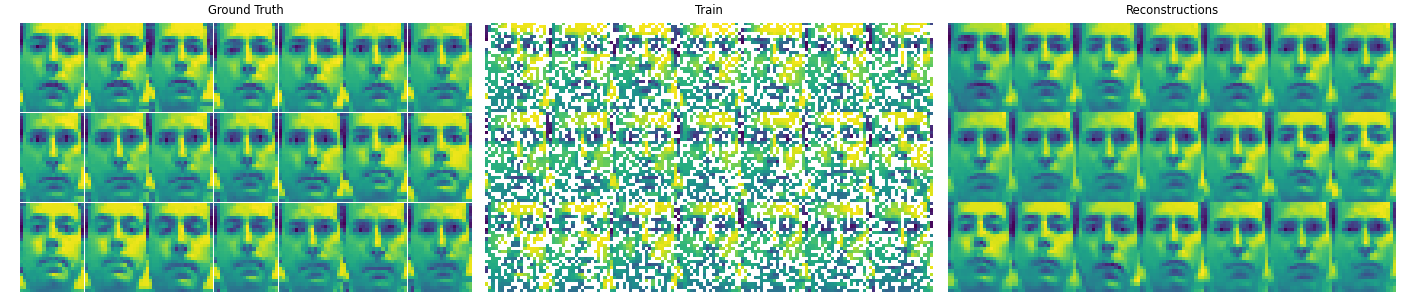
Robust to Missing Data: Brendan Faces Reconstruction
Trained on ~40% missing pixels
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
Robust to Missing Data: Motion Capture
Vidhi Lalchand, Aditya Ravuri, Neil D. Lawrence. Generalised GPLVM with Stochastic Variational Inference. In International Conference on Artificial Intelligence and Statistics (AISTATS), 2022
Summary
Thank you!
Thank you!
vr308@cam.ac.uk
@VRLalchand
By Vidhi Lalchand



